
Известный робот-манипулятор для литья под давлением
В последнее время в индустрии пластмассового литья под давлением наблюдается большой интерес к автоматизации, и, конечно,роботы-манипуляторы для литья под давлением занимают центральное место. Но часто возникает ощущение, что рынок переполнен предложениями, и сложно разобраться, какой вариант действительно эффективен и соответствует конкретным задачам. Мы в ООО Нинбо Хето Машинери Технолоджи, занимаемся этой областью уже несколько лет, и наши наблюдения говорят о том, что 'известность' не всегда равноценна оптимальности.
Что на самом деле важен выбор манипулятора?
Многие производители ориентируются на заявленные параметры – грузоподъемность, скорость перемещения, количество степеней свободы. Это важно, безусловно, но часто упускается из виду ключевой фактор – интеграция с производственным процессом. Понимаете, робот-манипулятор для литья под давлением – это не просто устройство для выгрузки готовых деталей. Это часть сложной системы, где важна синхронизация, точность и надежность. Неправильно выбранный манипулятор может стать 'узким местом', срывая всю цепочку производства. Мы постоянно видим, как компании, потратившие большие деньги на 'крутой' робот, сталкиваются с проблемами из-за неоптимальной интеграции или недостаточно квалифицированного персонала.
Особенности работы с высокоскоростными циклами
Сейчас все больше компаний стремятся к увеличению производительности за счет ускорения циклов литья. И здесьроботы-манипуляторы для литья под давлением с высокой скоростью перемещения и точными позиционирующими системами становятся критически важными. Но даже самый быстрый робот не поможет, если процесс выгрузки деталей занимает слишком много времени. Необходимо тщательно продумывать алгоритмы управления, оптимизировать траектории движения и учитывать особенности детали. Мы, например, работали с одним клиентом, у которого после внедрения нового робота-манипулятора, скорость выгрузки выросла, но общее время цикла не уменьшилось, а даже увеличилось. Пришлось провести глубокий анализ всего процесса, выявить 'бутылочные горлышки' и оптимизировать не только работу робота, но и конвейер, систему охлаждения, и даже процесс подготовки формы.
Особенно важно учитывать особенности деталей – их вес, форму, наличие выступающих элементов. Роботы-манипуляторы для литья под давлением, предназначенные для работы с тяжелыми деталями, должны обладать достаточной грузоподъемностью и устойчивостью. При работе с мелкими деталями важна высокая точность позиционирования, чтобы избежать повреждений. Мы часто рекомендуем нашим клиентам проводить тщательное моделирование процесса выгрузки, чтобы убедиться, что робот справится со всеми задачами.
Интеграция с системами управления литьем
Современные системы управления литьем (SPS) позволяют автоматизировать многие процессы, включая работу с роботами-манипуляторами. Важно, чтобыробот-манипулятор для литья под давлением полностью интегрировался с SPS, получая данные о состоянии процесса, скорости охлаждения, температуре расплава и т.д. Это позволяет оптимизировать работу робота в реальном времени, адаптироваться к изменениям и предотвращать ошибки.
Мы в ООО Нинбо Хето Машинери Технолоджи предлагаем решения для интеграции роботов-манипуляторов с различными SPS. Наши специалисты помогают подобрать оптимальные параметры работы робота, настроить алгоритмы управления и провести обучение персонала. Это позволяет нашим клиентам получить максимальную отдачу от внедрения автоматизации.
Примеры из практики: успехи и ошибки
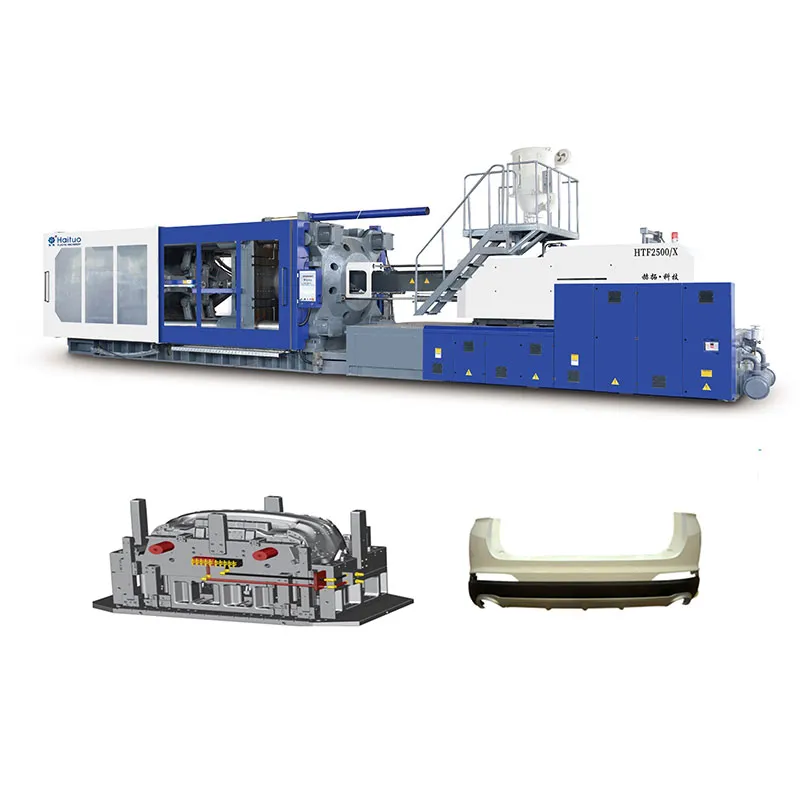
В одном из наших проектов мы установилиробота-манипулятора для литья под давлением на линию производства автомобильных деталей. Изначально планировалось, что робот будет выгружать детали на конвейер, но выяснилось, что детали часто падали с конвейера из-за неравномерного распределения веса. Пришлось разработать специальный механизм для стабилизации деталей перед выгрузкой. Этот случай показывает, что важно учитывать все факторы, влияющие на процесс выгрузки.
В другом случае компания, покупая 'самый дорогой'робот-манипулятор для литья под давлением на рынке, не учла особенности рабочей зоны. Робот оказался слишком крупным для помещения, что привело к необходимости перепланировки цеха и увеличению затрат. Это подчеркивает важность предварительного анализа производственной среды.
Перспективы развития
Сейчас активно развиваются технологии машинного зрения, которые позволяютроботам-манипуляторам для литья под давлением автономно распознавать детали и адаптировать процесс выгрузки к их особенностям. Также появляются новые типы роботов – гибкие и модульные, которые можно легко адаптировать к различным задачам. Мы в ООО Нинбо Хето Машинери Технолоджи следим за всеми тенденциями в этой области и предлагаем нашим клиентам самые современные и эффективные решения.
В заключение, хочется сказать, что выборробота-манипулятора для литья под давлением – это не просто техническая задача, это инвестиция в будущее производства. Важно подходить к этому вопросу комплексно, учитывать все факторы, влияющие на процесс выгрузки, и обращаться к опытным специалистам, которые помогут подобрать оптимальное решение.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Чиллер с водяным охлаждением
Чиллер с водяным охлаждением -
 Стандартный сервоприводной термопластавтомат
Стандартный сервоприводной термопластавтомат -
 Дробилка для пластмасс
Дробилка для пластмасс -
 Специализированный термопластавтомат для вёдер
Специализированный термопластавтомат для вёдер -
 Двухплитный термопластавтомат для производства стульев
Двухплитный термопластавтомат для производства стульев -
 Вакуумный питатель
Вакуумный питатель -
 Термопластавтомат европейским стандартам
Термопластавтомат европейским стандартам -
 Сушильная установка
Сушильная установка -
 Стандартный сервоприводной термопластавтомат для товаров народного потребления
Стандартный сервоприводной термопластавтомат для товаров народного потребления -
 Двухцветный термопластавтомат
Двухцветный термопластавтомат -
 Роботизированная рука
Роботизированная рука -
 Специализированный термопластавтомат для ПВХ-фитингов
Специализированный термопластавтомат для ПВХ-фитингов
Связанный поиск
Связанный поиск- Купить термопластавтомат для литья жидкой силиконовой резины
- Китай настольный термопластавтомат производитель
- Китай микротермопластавтомат поставщики
- Купить термопластавтомат цена
- Автоматический загрузчик
- Китай специализированный термопластавтомат для фруктовых контейнеров
- Китай специализированный термопластавтомат для оборотных тар производитель
- Китай чиллер для охлаждения воды замкнутая система промышленный поставщики
- Дешево термопластическое литье под давлением
- Высококачественный вертикальная машина для литья под давлением